









扫码加入qtouch技术交流群

引言
(软件获取方式:注册后,联系我方获取下载)
随着多领域建模仿真技术的发展,Modelica作为一种面向对象的、声明式的多领域统一建模语言,在复杂系统仿真中发挥着越来越重要的作用。Modelica 以其高度的可重用性、非因果性和基于方程的建模方式,为工业界和学术界提供了一种强大的仿真工具。
Modelica概述
Modelica发展历程
Modelica 语言的发展可以追溯到 1996 年,由多个欧洲研究机构、工业企业和大学合作开发,目标是提供一种开放标准的建模语言,以替代早期的专有仿真工具,如 MatLab、ASCET-SD 和 Simulink。
◆ 1996 年:由多个学术和工业组织联合发起 Modelica 语言的开发。
◆ 1997 年:发布 Modelica 1.0,确立了基本的方程建模和面向对象结构。
◆ 2004 年:Modelica 2.0 发布,引入更完善的组件化建模方式。
◆ 2008 年:Modelica 3.0 版本发布,进一步优化了语言的结构和求解效率。
◆ 2020 年至今:Modelica 语言继续发展,支持更多物理域和复杂系统建模,并被广泛应用于工业和科研领域,如汽车、电力系统、航空航天等。
Modelica 语言由 Modelica Association(Modelica 协会) 维护和推广,该协会是一个非盈利组织,致力于开发和维护 Modelica 语言及其相关标准。其主要职责包括:
◆ 维护 Modelica 语言标准,确保其持续改进和兼容性。
◆ 开发和推广 Modelica 标准库(Modelica Standard Library, MSL),提供各种可复用的物理组件。
◆ 组织 Modelica 会议(Modelica Conference),促进学术界和工业界的合作交流。
◆ 管理 FMI(Functional Mock-up Interface)标准,该标准用于多种仿真工具之间的模型交换和联合仿真。
Modelica 协会的成员包括全球多个企业、研究机构和高校,如宝马(BMW)、博世(Bosch)、西门子(Siemens)、Fraunhofer 研究所、瑞典查尔姆斯理工大学等。
Modelica语言特点
Modelica是一种非因果的、基于方程的建模语言,它支持多领域物理系统的建模与仿真。Modelica模型由类(class)组成,每个类可以包含变量、参数、方程和连接等元素。Modelica模型具有高度的可重用性和可扩展性,便于不同领域之间的模型集成。其主要特点包括:
◆ 声明式建模:使用方程表示物理系统,自动求解变量关系。
◆ 面向对象:支持模块化和继承,提高建模效率。
◆ 多领域统一:支持机械、电气、流体、热力、控制等多个物理领域。
◆ 开放标准:由 Modelica Association 维护,拥有广泛的工业与学术支持。
Modelica相关标准
Modelica 生态系统包含多个标准,除了核心 Modelica 语言外,还包括:
◆ Modelica 标准库(MSL):提供热力学、电气、机械等通用物理组件。
◆ FMI(Functional Mock-up Interface):用于不同仿真工具之间的模型交换和联合仿真。
◆ SSP(System Structure and Parameterization):用于系统级建模和参数化管理。
◆ DCP(Distributed Co-Simulation Protocol):支持分布式联合仿真。
Modelica仿真环境
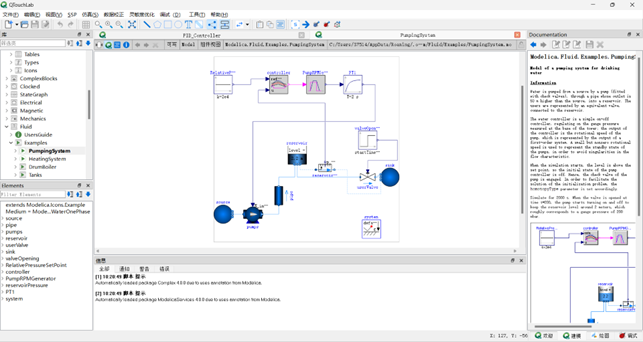
Modelica 仿真环境包括多种工具,如 OpenModelica、Dymola、Wolfram System Modeler、JModelica.org 等。QTouchLab 作为 Modelica 生态中的一员,提供了图形化建模界面、模型库、仿真求解器等功能,方便用户进行模型搭建、仿真分析和结果可视化。
Modelica的应用领域
Modelica 由于其跨学科建模能力,被广泛应用于多个行业,并支持多种工业级产品,包括但不限于:
◆ 汽车与轨道交通:发动机建模、整车动力学、制动系统、电驱动系统等(应用于 Dymola、AMESim)。
◆ 航空航天:飞行器热管理、姿态控制、推进系统仿真(NASA、ESA 相关项目)。
◆ 能源与电力:智能电网建模、可再生能源优化、储能系统(OpenModelica 在电网仿真中的应用)。
◆ 工业自动化:机器人控制、生产流程优化、流体动力学(Wolfram System Modeler 在过程控制中的应用)。
◆ 生物医学:心血管系统建模、生物力学仿真(Modelica 在生物工程研究中的探索)。
QTouchLab建模步骤
确定仿真目标
首先,需要明确仿真的目标和要求,包括仿真的物理系统、关注的变量、期望的仿真结果等。
建立数学模型
根据仿真目标,建立相应的数学模型。模型可以基于物理定律、经验公式或实验数据等。在Modelica中,数学模型通常表示为一系列方程和变量。
例如小球自由下落的重力方程:
小球从初始高度 h 处自由下落,重力加速度为 g,取竖直向下为正方向。
搭建模型结构
在Modelica仿真环境中,利用提供的模型库或自定义组件,搭建模型的物理结构。这包括定义模型的各个部分、设置参数和变量、建立连接等。
编写方程和代码
对于复杂的模型,可能需要编写额外的方程和代码来描述模型的动态行为。QTouchLab支持基于文本的方程编写和基于图形的连接建模两种方式。

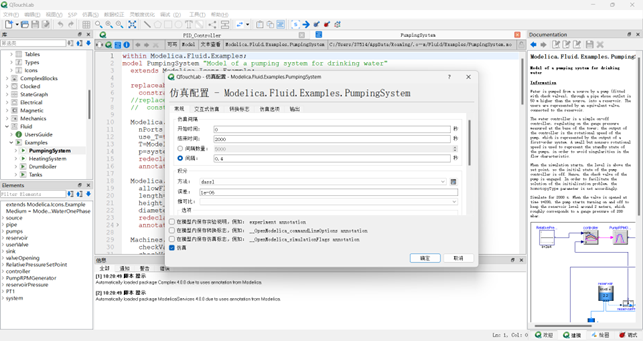
设置仿真参数
在仿真开始之前,需要设置仿真参数,如仿真时间、步长、输出变量等。这些参数会影响仿真的精度和效率。
运行仿真
设置好仿真参数后,可以运行仿真以观察模型的行为。仿真过程中,可以实时监控变量的变化并保存仿真结果。

分析仿真结果
仿真结束后,需要对仿真结果进行分析。这包括绘制图表、计算统计量、验证模型准确性等。通过分析仿真结果,可以评估模型的性能并提出改进建议。
结论
QTouchLab 依托 Modelica 强大的多领域建模能力,构建了一套高效、直观的仿真解决方案,能够满足复杂系统建模与分析的需求。其核心优势体现在以下几个方面:
◆ 高度模块化与可复用性:QTouchLab 通过 Modelica 的面向对象建模方式,实现了模型组件的高度复用和灵活组合,使用户能够快速构建和扩展仿真系统。
◆ 支持多领域耦合仿真:借助 Modelica 强大的物理建模能力,QTouchLab 可以实现跨电气、机械、热力、控制等多个领域的系统耦合仿真,提供更精确的系统级分析。
◆ 丰富的建模方式:QTouchLab 支持基于文本的方程建模和基于图形的组件连接建模,兼顾专业用户和普通工程师的使用需求,提高了建模效率和可读性。
◆ 高效的仿真求解:通过集成先进的数值求解器和优化算法,QTouchLab 能够高效执行大规模仿真计算,提高仿真精度,缩短计算时间。
◆ 直观的结果分析与优化:QTouchLab 提供完善的仿真结果可视化工具,支持动态监控变量变化、绘制结果曲线、计算关键性能指标,并基于分析结果优化模型,提高系统设计的可靠性与性能。
综上所述,QTouchLab 依托 Modelica 的建模能力,提供了一种集灵活性、易用性与高效性于一体的仿真平台,适用于多领域复杂系统的设计、优化与验证,助力工程师提升研发效率和系统创新能力。
 4009-027-005
4009-027-005
 gaowf_sitc@126.com
gaowf_sitc@126.com
